

Introduction au problème
A travers ce billet de blog, nous allons vous présenter notre projet de recherche : SimGait.
L’objectif est de pouvoir soutenir les médecins dans la prise de décision et d’améliorer le traitement de patients souffrant de pathologies de la marche – Voir ci-dessous un exemple d’un cycle de démarche. Gait, démarche en français, fait référence au problème à traiter et Sim se réfère à “simulation”. Ce projet est soutenu par Swiss National Science Foundation (Fonds National Suisse). Afin d’atteindre le but mentionné ci-dessus le projet va combiner des techniques d’apprentissage automatique, de robotique et de biomécanique. Deux approches seront utilisées : l’analyse orientée données et l’analyse orientée modèles. Les équipes pourront développer une compréhension de la locomotion humaine et s’entraider grâce à leur expertise.
Figure 1 : Exemple d’un cycle de démarche
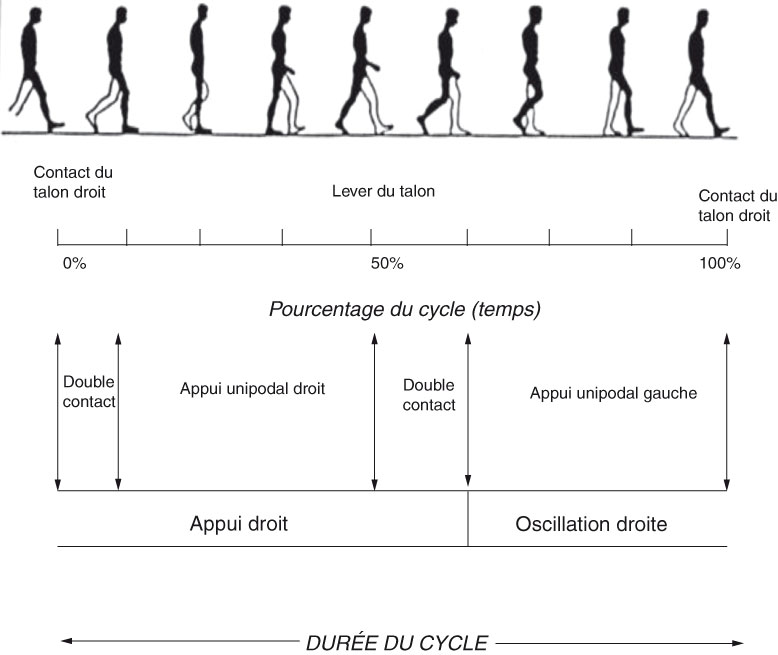
(CEN, 2016)
Pour cela, un consortium de trois partenaires a été créé. Le laboratoire Willy Tallard de kinésiologie aux HUG, mené par le Docteur Stéphane Armand, collabore avec son expertise métier et c’est le responsable pour la génération de données pertinentes. Le groupe BIOROB de l’EPFL, dirigée par le Professeur Auke Ijspeert, et son but est de développer un modèle neuro-musculaire de pathologies de la marche. De part leur expertise, le groupe DMML, mené par le Professeur Alexandros Kalousis, permettra d’exploiter des données grâce à leur expérience dans le domaine du machine learning.
Spécifications techniques
Un nombre conséquent de données, qui dépend du problème, est nécessaire afin d’assurer une bonne performance des algorithmes de prédictions statistiques. Or, le jeu de données actuellement disponible répertorie seulement quelques centaines de patients.
Le modèle neuro-musculaire qui sera développé par le groupe BIOROB pourra être utilisé pour comprendre ces pathologies afin d’aider les médecins spécialistes dans la prise de décision. De plus, il pourra être utilisé pour générer des données supplémentaires pour alimenter les analyses de données ou l’entraînement des algorithmes d’apprentissage automatique.
Données cliniques
Chaque patient possède plus de 200 mesures qui lui sont propres. Ceux-ci sont caractérisés par des identifiants uniques dans le but de les distinguer malgré l’anonymisation des données. D’autres données plus classiques sont également présentes comme l’âge, le sexe, le poids, la masse musculaire, etc. Ensuite, nous avons d’autres mesures plus liées au métier : la longueur des membres (pieds, genoux, chevilles, jambes) définie en millimètres, l’amplitude de mouvement (genoux, anches, chevilles) représentées en angles et bien d’autres encore.
La récolte de données de la démarche
Trente-trois capteurs de mouvement sont utilisés sur les patients à des endroits précis afin de collecter des données utiles à la compréhension de la démarche humaine et en faire un modèle – comme cité dans l’Introduction. Chaque capteur enregistre les mouvements dans un espace en trois dimensions avec une fréquence de 100 Hertz sur une distance de 10m dans un laboratoire de kinésiologie. Un certain nombre de “frames” est enregistré chaque seconde et cette quantité totale de “frames” capturées dépend de la vitesse à laquelle marche le patient; un patient marchant plus vite, va parcourir la même distance en moins de temps. Voici une figure illustrant la démarche d’un vrai patient en utilisant le logiciel de visualisation 3D Mokka.
Figure 2 : Illustration de la démarche d’un patient en utilisant un logiciel de visualisation 3D
Voici comment ces capteurs sont placés d’une manière plus précise dans un contexte médical :
Figure 3 : Schéma montrant le placement correct des capteurs de mouvement dans un contexte médicale
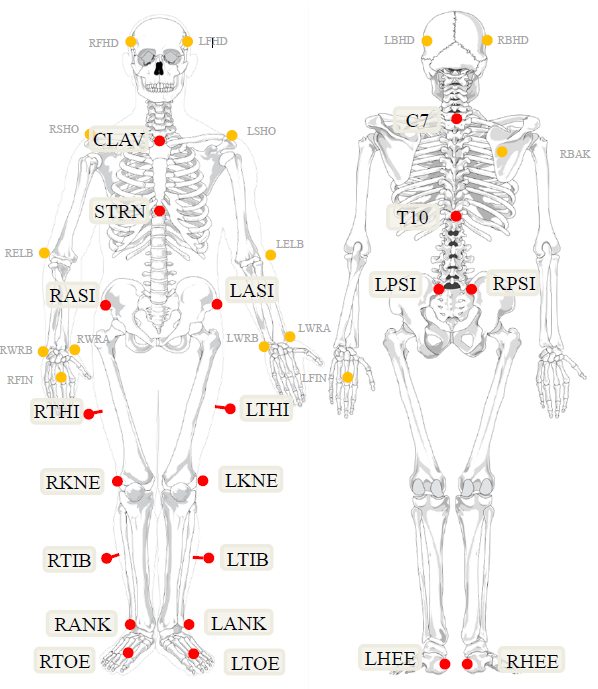
(Davis et al., 1991)
Cette capture peut poser quelques problèmes dans la phase de prédiction. En effet, puisqu’il y a une dimension manuelle dans le protocole de placement des capteurs par les médecins, cela introduit de la variabilité dans les mesures de ceux-ci, en plus de variabilité inhérente de la démarche de chaque individu. Ceci peut rendre les prédictions statistiques plus difficilement performantes.
Quel intérêt ?
Comme mentionné ci-dessus, notre objectif est d’aider les médecins spécialistes dans la prise de décision. En effet, les médecins savent comment une opération de chirurgie affecte les données cliniques d’un patient, mais ils ne savent pas comment ceci affecte sa démarche. En ayant un bon modèle statistique à disposition, les spécialistes devraient pouvoir déterminer comment une opération impacte les données cliniques et par conséquent, leur démarche. De ce fait, trois éléments sont nécessaires: données cliniques, représentation de la démarche et le lien entre ces deux éléments.
Type de données
Les données sont générées à partir des trente-trois capteurs. Ils capturent leurs coordonnées dans l’espace à trois dimensions (x, y, z) d’une manière temporelle. Les analyses de données peuvent être effectuées sur ces données, et nous pouvons les utiliser pour calculer l’angle des articulations et leur évolution dans le temps.
Chaque représentation de la démarche, soit-elle en coordonnées ou angles, peut nous aider à approximer le but que nous voulons atteindre : pouvoir déterminer n’importe quel instant donné de la démarche d’un patient à partir de ses données cliniques. Par exemple, nous devrons pouvoir déterminer l’état de chaque personne à un pourcentage donné d’un cycle de démarche. Veuillez vous référer à la Figure 1 et à la Figure 4 afin de voir ce que nous essayons de prédire.
Voici l’exemple d’un graphique affichant l’évolution de l’angle calculé pour la cheville gauche. Les traits verticaux verts et rouges représentent des événements.
Figure 4 : Graphique affichant l’évolution de l’angle de la cheville gauche au long d’un seul cycle de démarche
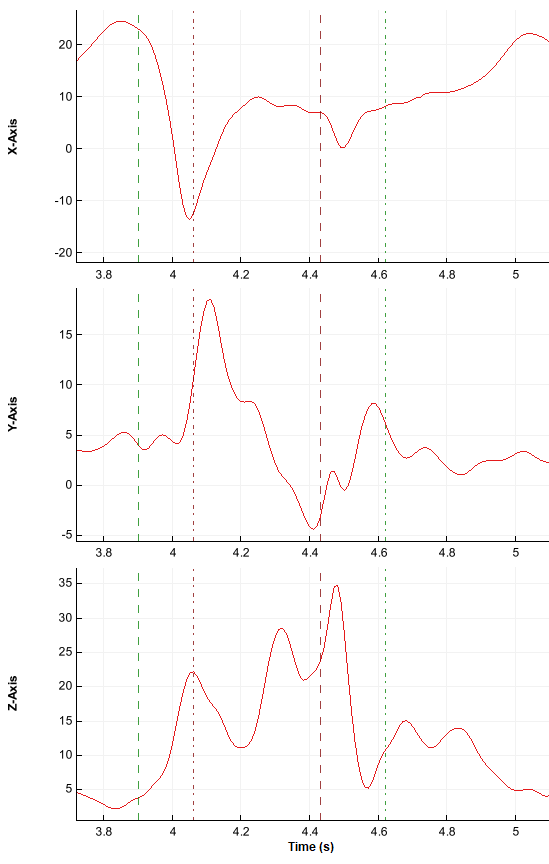
Nous avons 4 types d’événements distincts par cycle : lorsqu’un talon touche par terre, lorsqu’un talon est levé et ce, pour les deux pieds.
Les événements se produisent dans l’ordre suivant :
- Contact du talon droit
- Lever du talon gauche
- Contact du talon gauche
- Lever du talon droit
Lorsque le talon droit est de nouveau en contact avec le sol, un nouveau cycle commence, et ainsi de suite.
Les difficultés au sein de l’équipe
Nous sommes trois étudiants, Barreiro Lindo Flávio, Gülen Lucas et Perritaz Alex, sans expérience conséquente dans le domaine du data science et nous savons qu’il sera difficile pour nous de pouvoir trouver une réponse définitive au problème à traiter.
Nous comptons sur le soutien du Professeur Alexandros Kalousis et des assistants João Candido et Pablo Strasser pour le déroulement de notre premier réel projet de recherche dans les meilleures conditions possibles et sommes convaincus de pouvoir contribuer au projet avec de nouvelles approches.
Bibliographie
CEN, 2016. Trouble de la marche et de l’équilibre. In : Collège des Enseignants de Neurologie [en ligne]. 19 septembre 2016. [Consulté le 26 juin 2019]. Disponible à l’adresse : https://www.cen-neurologie.fr/deuxi%C3%A8me-cycle%20/trouble-marche-lequilibre.
DAVIS, Roy B., OUNPUU, Sylvia, TYBURSKI, Dennis et GAGE, James R., 1991. A gait analysis data collection and reduction technique. In : A gait analysis data collection and reduction technique. octobre 1991.