

Par Alexandre Da Mota et Thomas Carreira
Introduction
Dans ce billet de blog, notre objectif va être d’expliquer les résultats que nous avons obtenus à la suite de notre travail de recherche. Ce dernier avait pour but la génération d’un agent capable d’imiter la démarche d’un patient spécifique. Pour cela nous avons utilisé les données des HUG qui s’articulent sous forme de représentation 3d de la marche des patients. A partir de celle-ci, nous avons utilisé l’algorithme GAIL (lien vers notre billet de blog décrivant cet algorithme) qui nous a permis de générer notre agent.
Résultats
Une fois l’entraînement de notre agent terminé, voici le résultat que nous avons obtenu. Vous pouvez observer ci-dessous notre agent en vert et le patient en blanc évoluer le long de l’axe x. Cette vidéo est en ralenti, afin d’avoir bien le temps d’analyser leur démarche.
Au début, la marche des deux squelettes est bien synchronisée, mais au fil du temps notre agent va peu à peu se décaler par rapport au patient. La vidéo ne dure pas plus longtemps, car les données du patient que nous avons à dispositions s’arrêtent là.
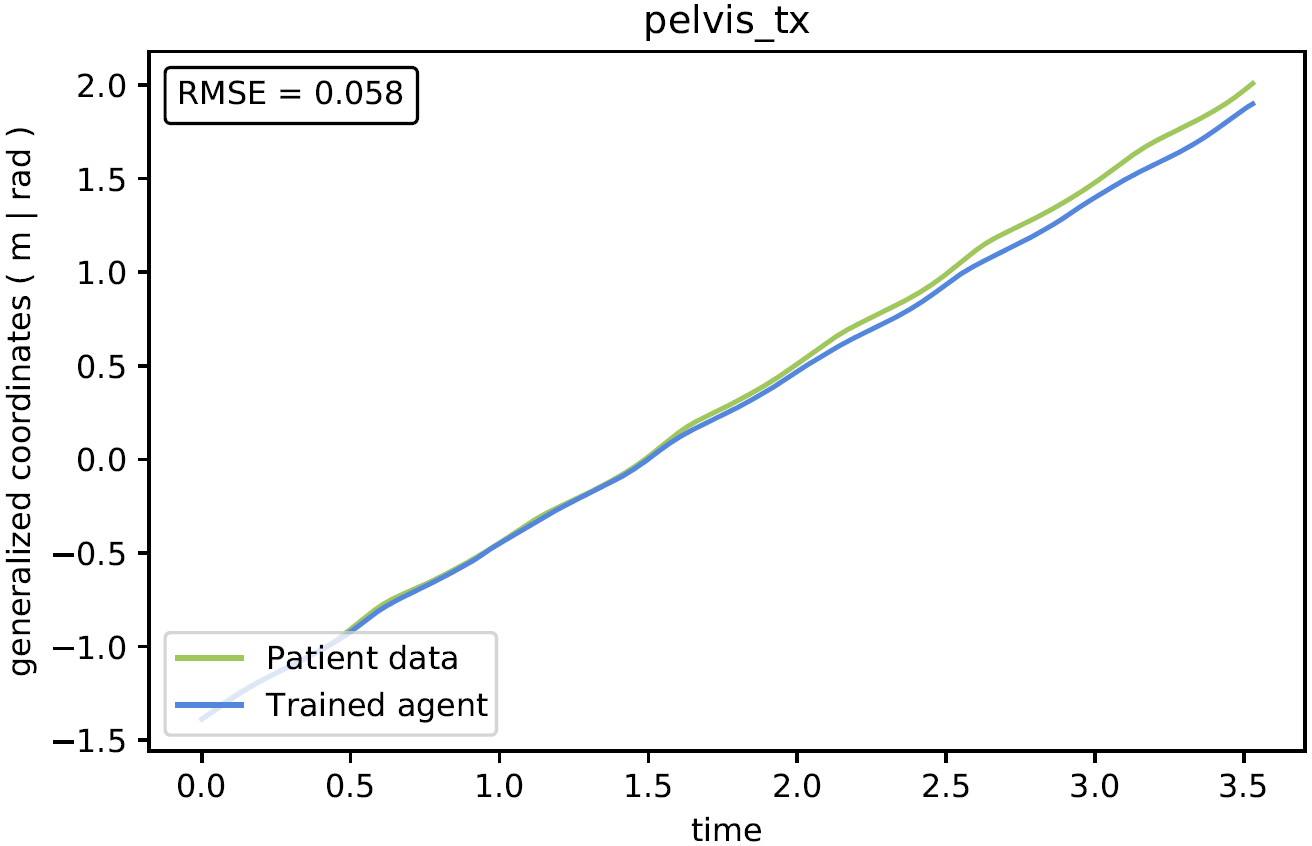
Grâce au graphique ci-dessous, il est possible d’observer le déplacement du bassin de nos deux squelettes sur l’axe des x. Ceci nous permet d’appuyer le fait que notre agent se déplace approximativement à la même vitesse, dans l’espace x, que le patient.
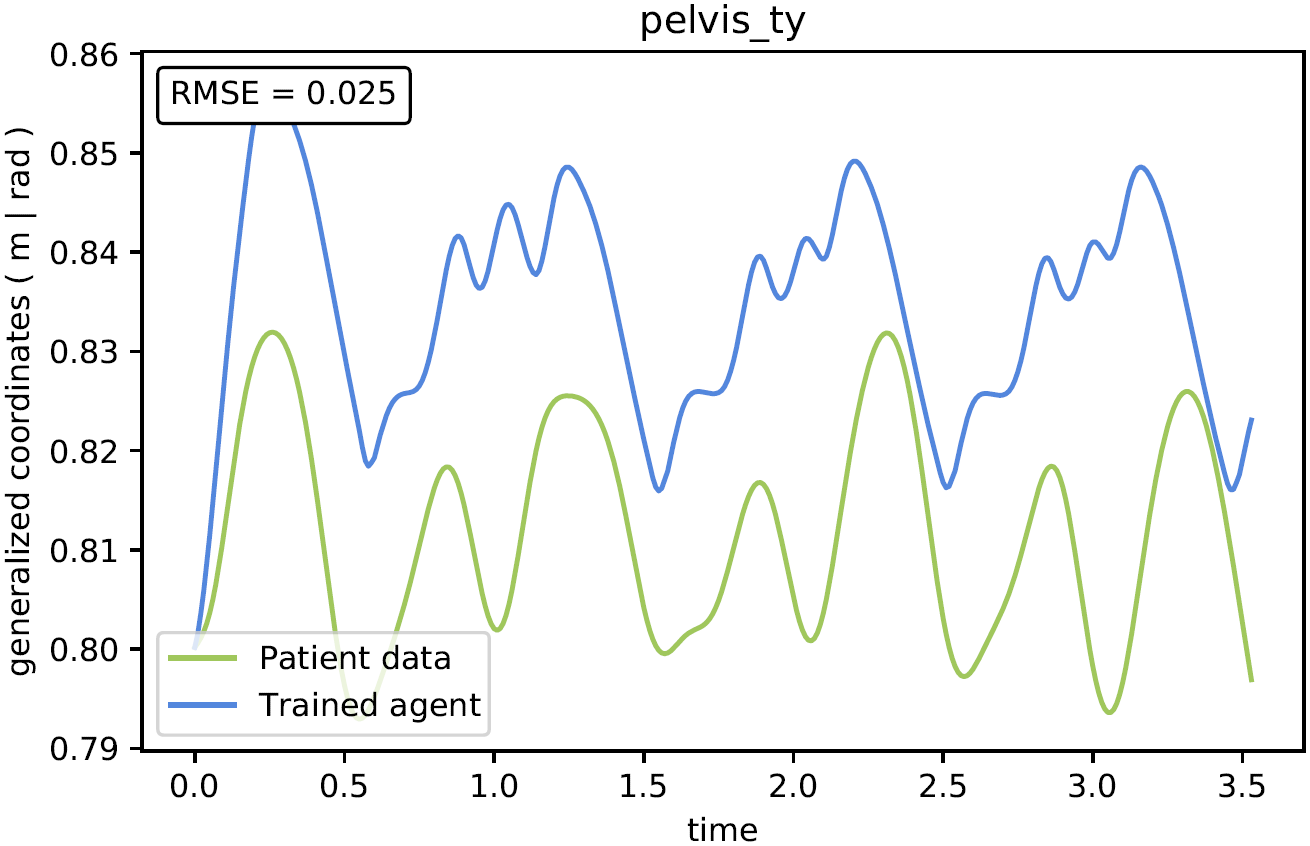
Ce nouveau graphique décrit le déplacement du bassin dans l’axe des y. Nous avons l’impression dans un premier temps, que le décalage est très important comparé au graphique précédent. Cependant, la RMSE (Root Mean Square Error) en haut à gauche indique l’erreur entre le tracé de notre agent comparé à celui du patient. Plus la distance entre les deux courbes sera importante, plus l’erreur sera grande. C’est pour cette raison qu’il est important de prendre en compte l’axe des y de nos graphiques, car on peut observer que d’un graphique à l’autre l’échelle des valeurs change.
Grâce à ces explications, il est désormais possible de comprendre que la distance entre les deux courbes de notre graphique ci-dessous n’est pas plus importante que sur le graphique précédent.
Sur la vidéo suivante, nous observons la marche du patient de dos. Ainsi, il nous est également possible de constater un décalage assez important sur le côté ce qui correspond à l’axe z. On peut observer que notre agent reste relativement centré comparé au patient qui part sur la gauche puis revient au centre avant de finir par repartir à droite à la fin de la vidéo.

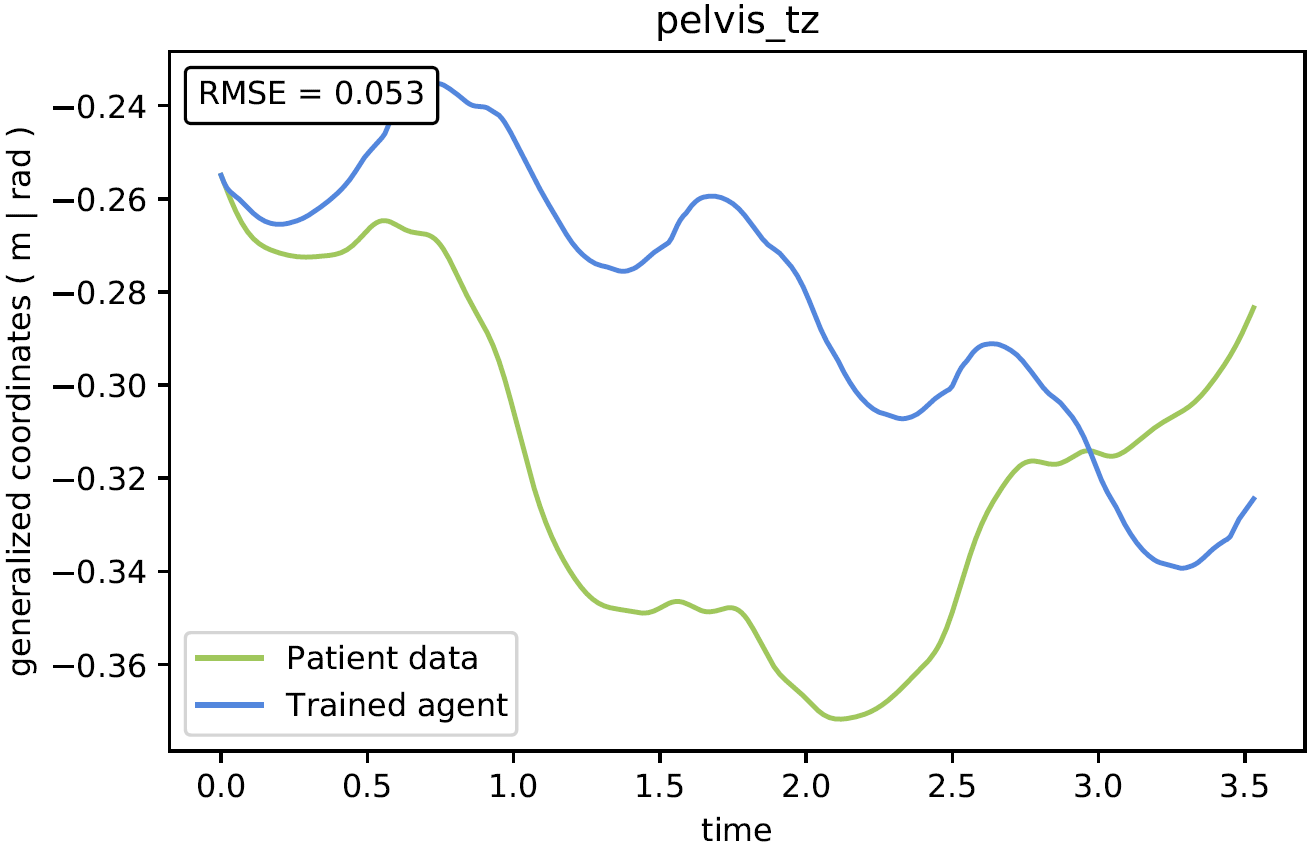
Pour appuyer cette vidéo, voici le graphique décrivant le déplacement du bassin par rapport à l’axe z. La courbe bleue de notre agent décrit un déhanché du bassin relativement régulier qui se décale petit à petit dans le temps. En revanche, le déhanché du patient est bien plus irrégulier.
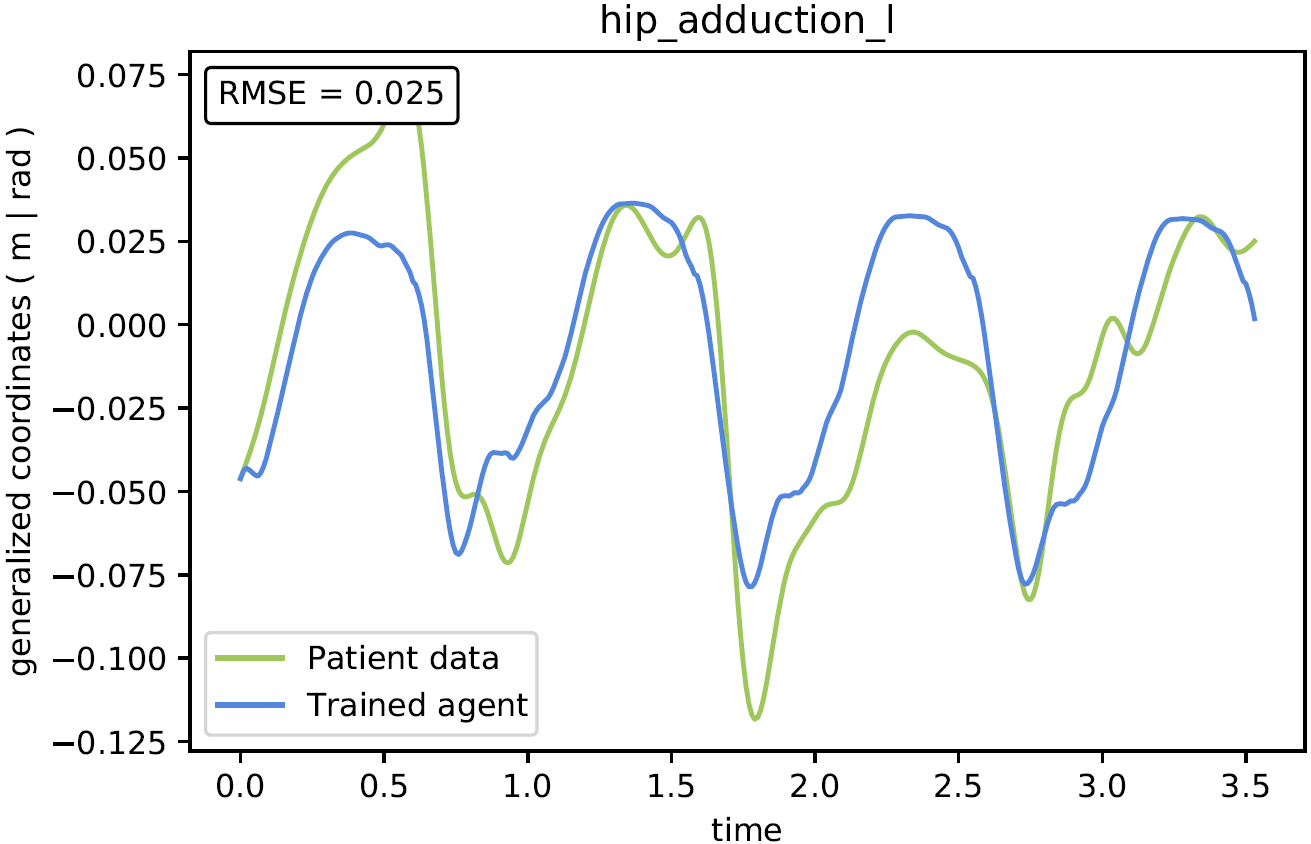
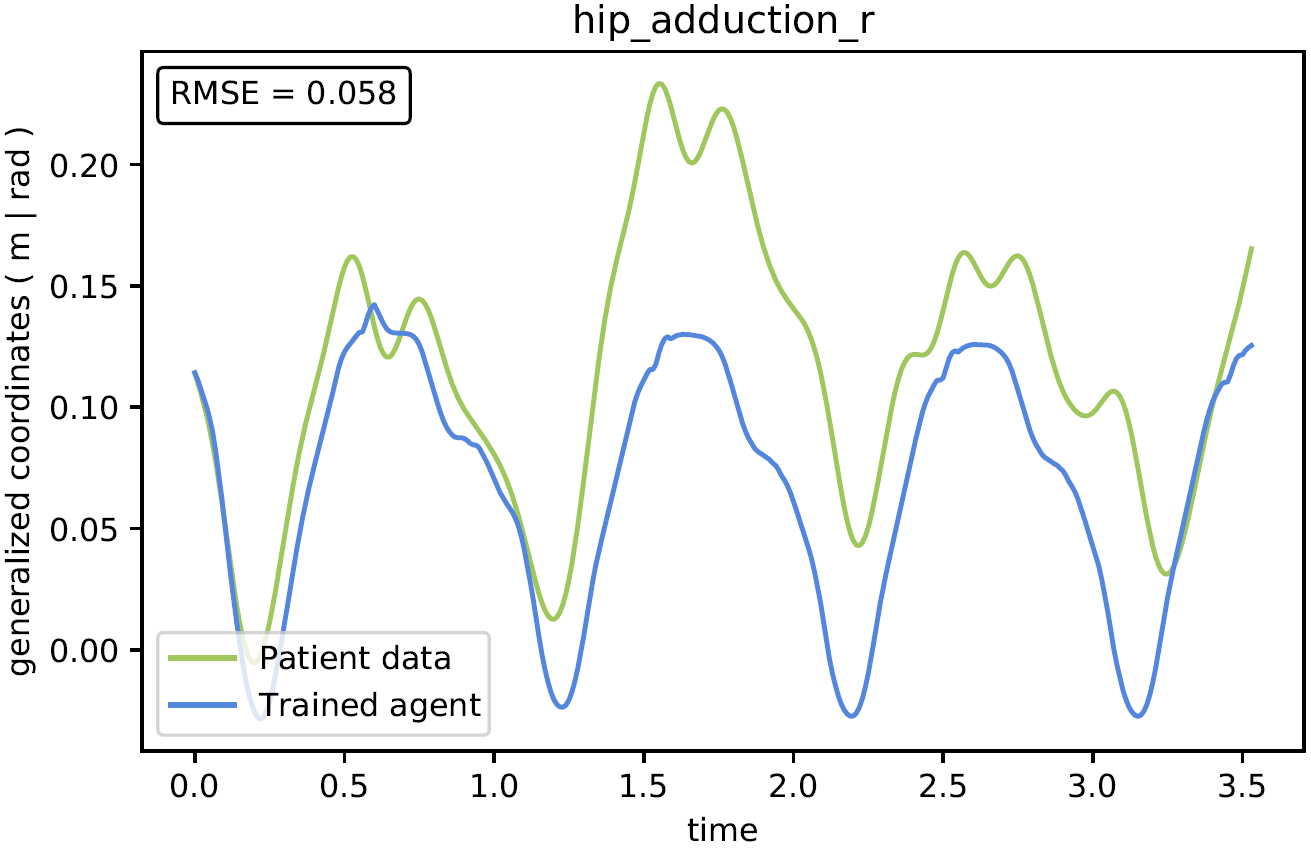
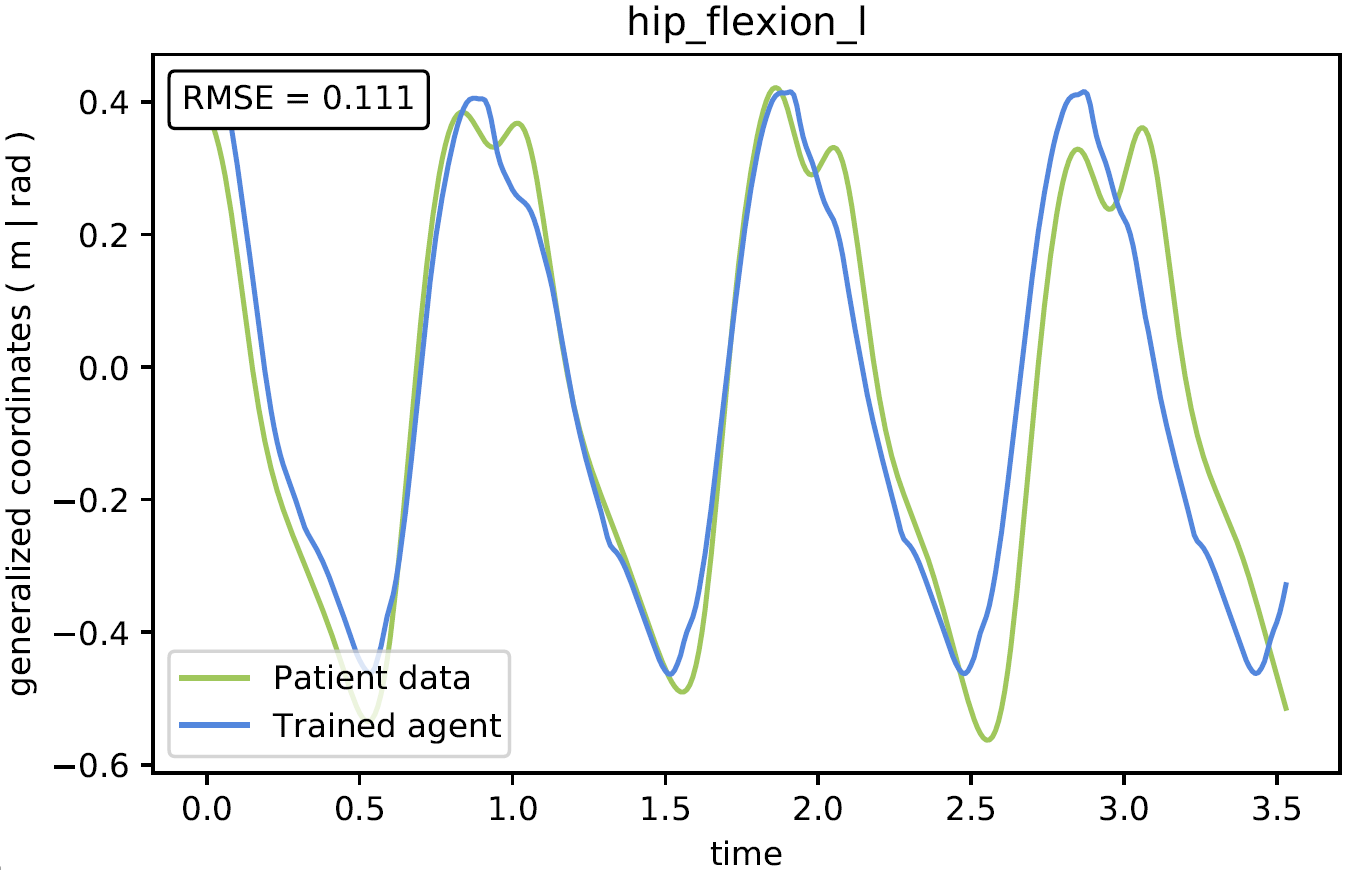
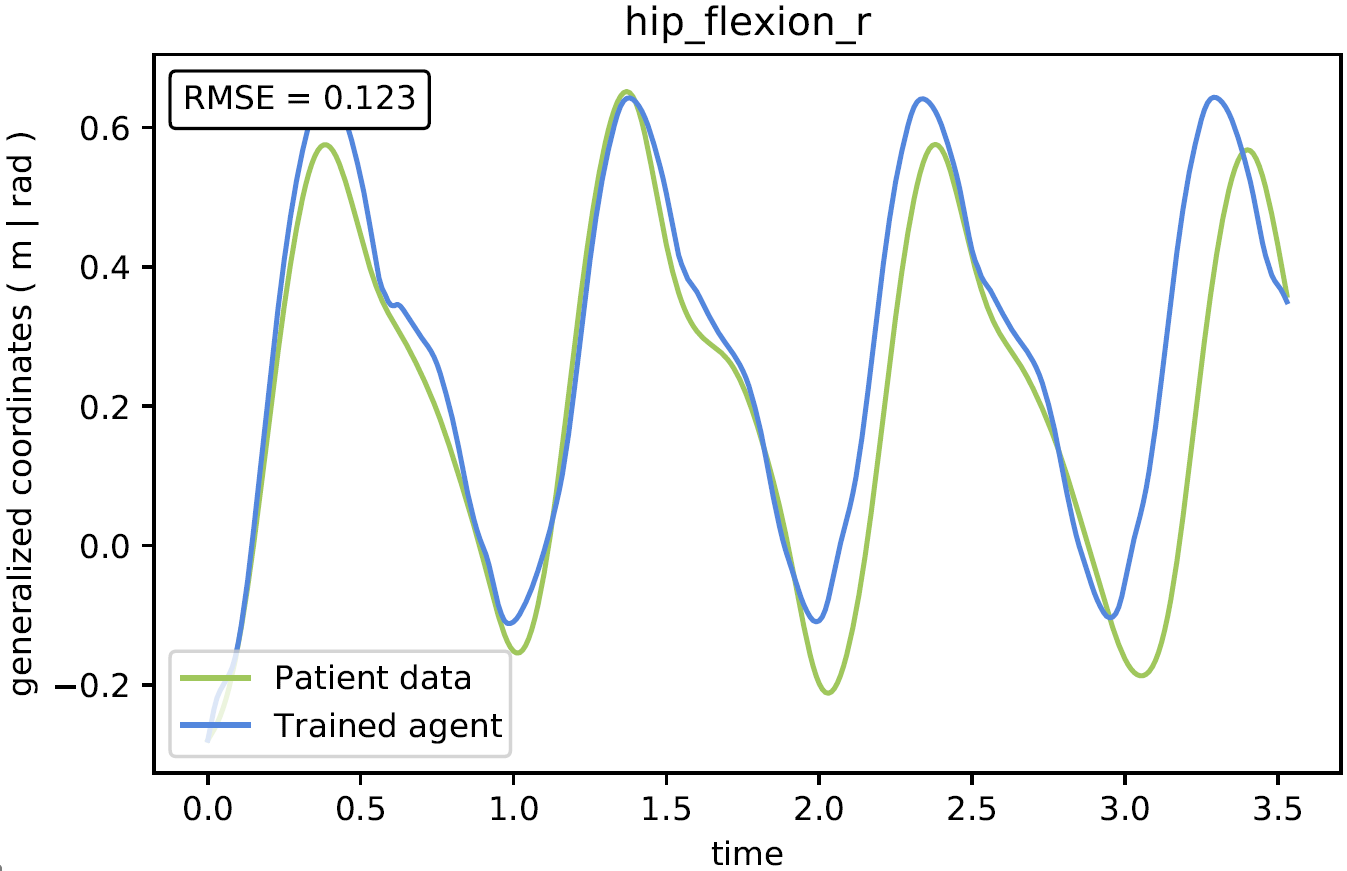
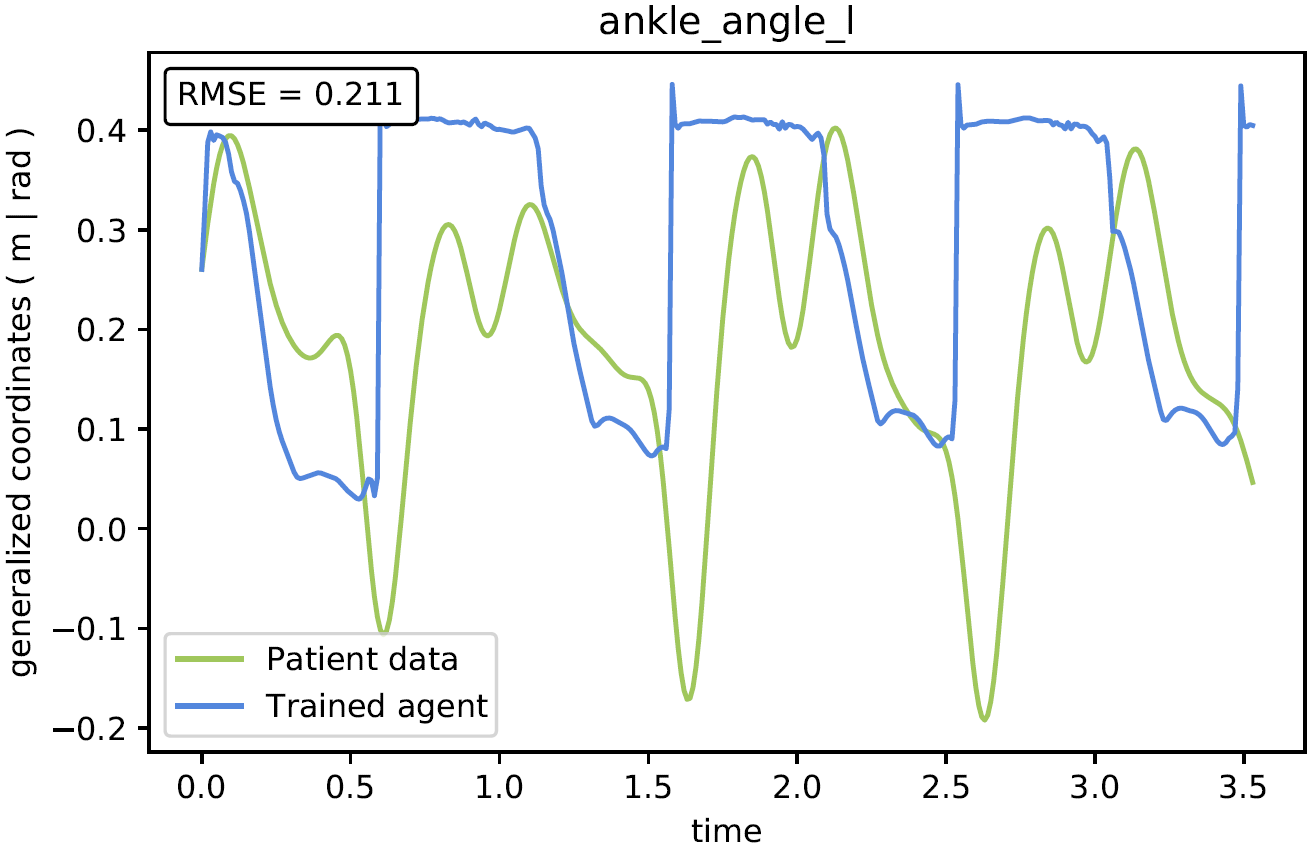
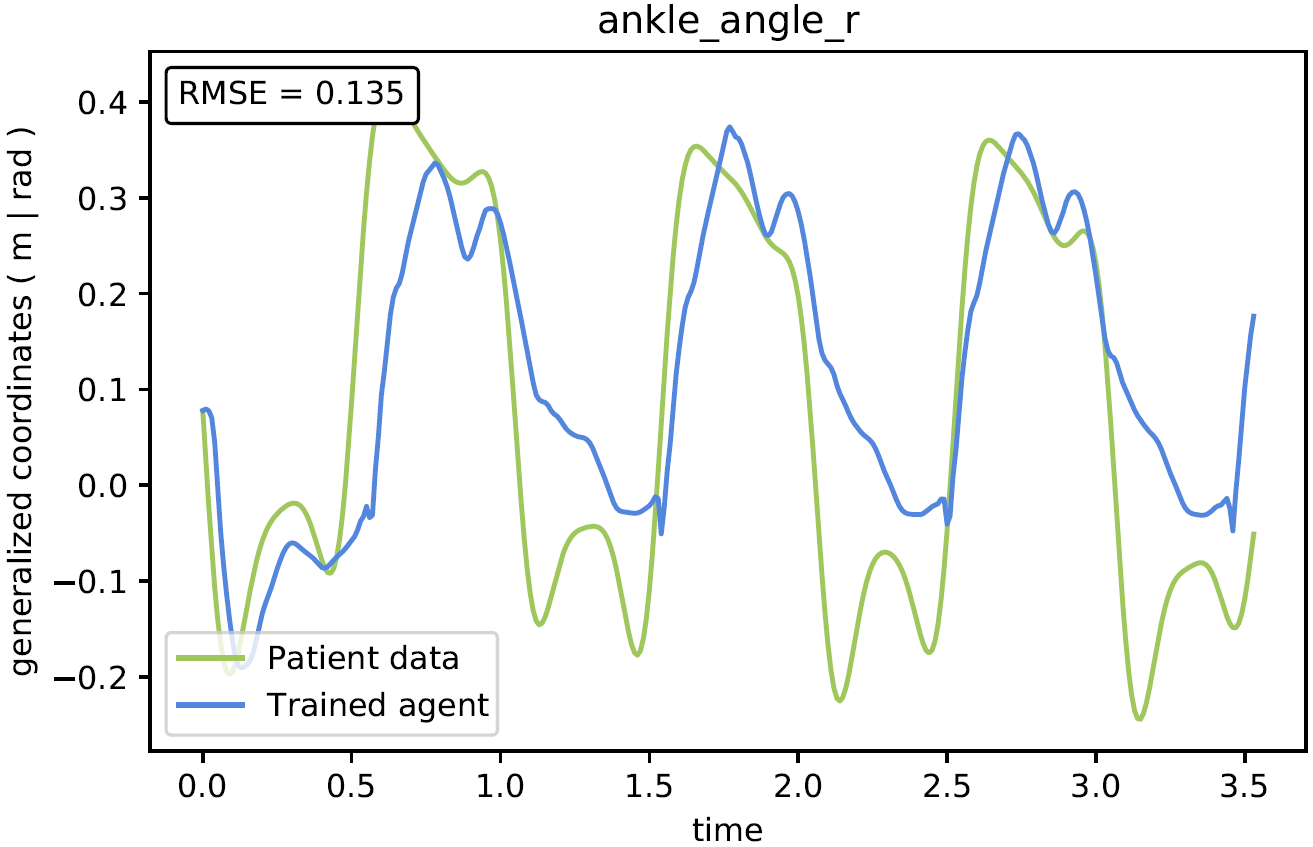
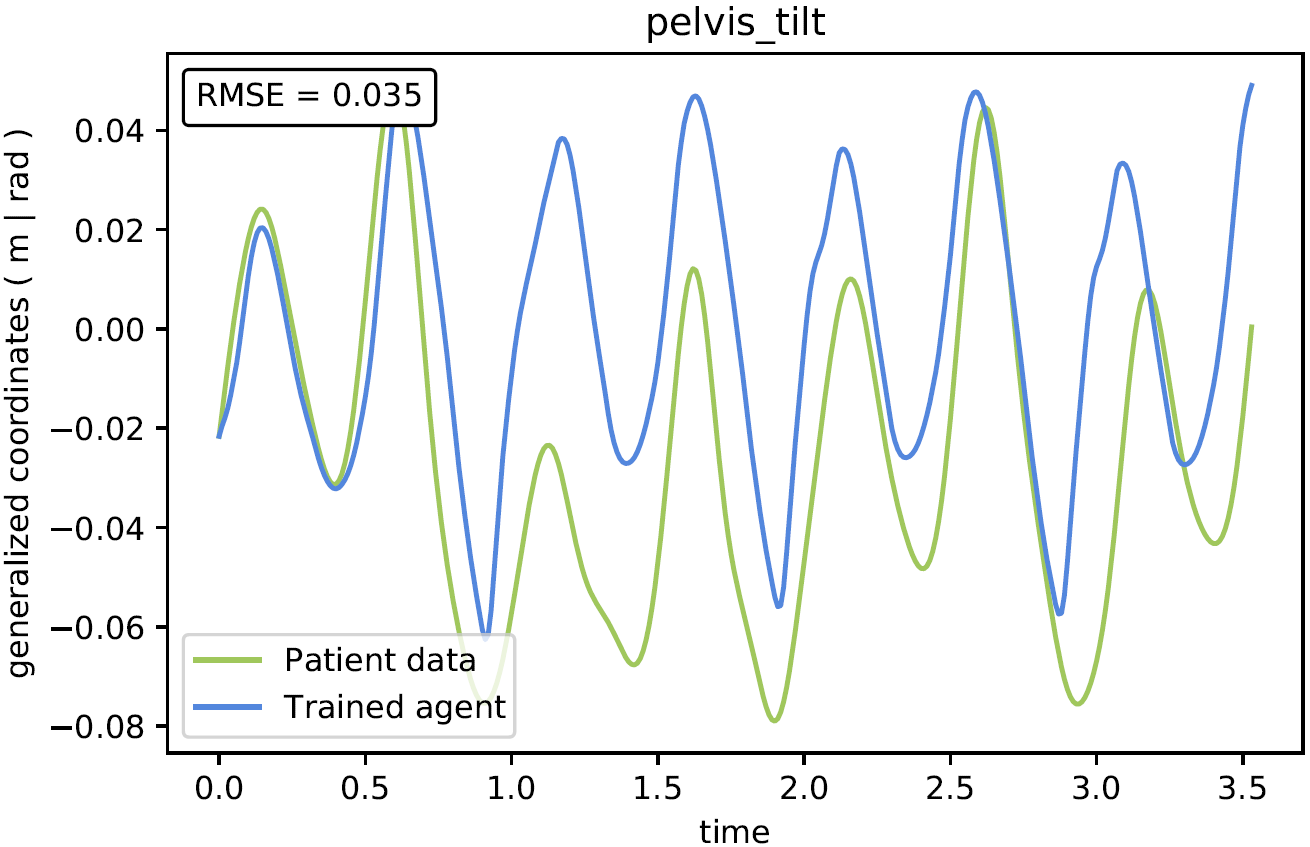
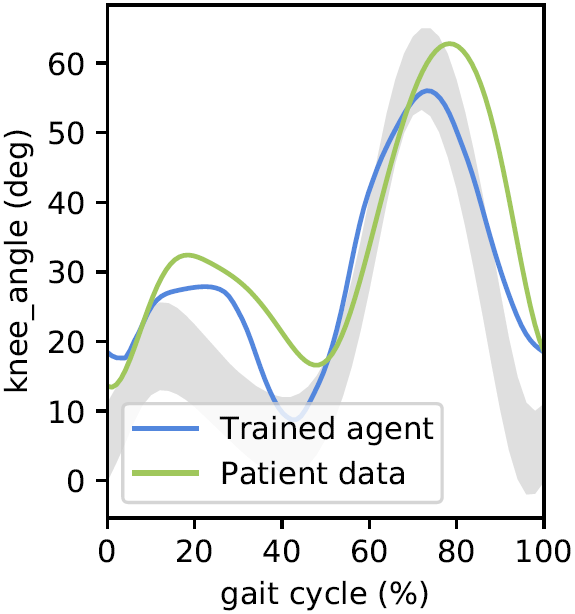
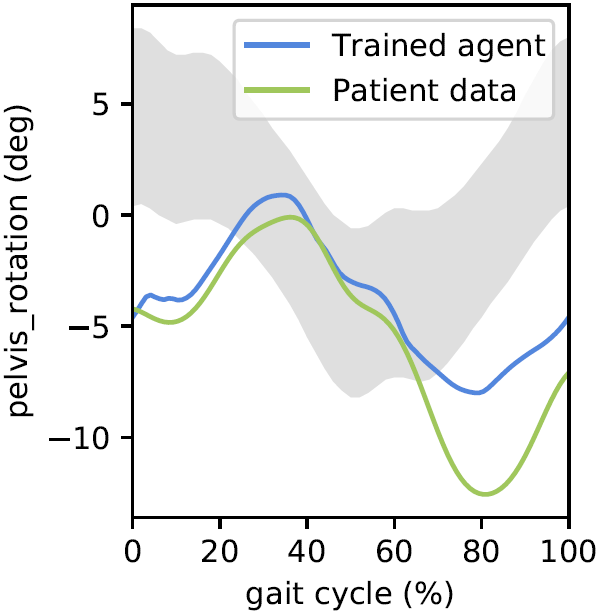
Les graphiques ci-dessous correspondent à d’autres parties du corps comme la hanche, les chevilles, les genoux ainsi que deux autres mouvements du bassin, la rotation ainsi que l’inclinaison. La lecture de ces prochains graphiques s’effectue de la même façon que celle que l’on vient d’effectuer sur les graphiques précédents.



Le graphique ci-dessous décrit la précision de notre modèle. Sur ce dernier, il est possible d’observer une augmentation significative de la précision jusqu’à 10M d’itérations où il se stabilise et finit par régresser. De ce fait, on peut assurément dire que le modèle actuellement entraîné ne peut pas être amélioré en augmentant le nombre d’itérations mais avec un changement des hyper-paramètres. En effet, grâce au graphique, il est possible d’observer la limite des hyper-paramètres utilisés pour l’entraînement de l’agent.

Conclusion
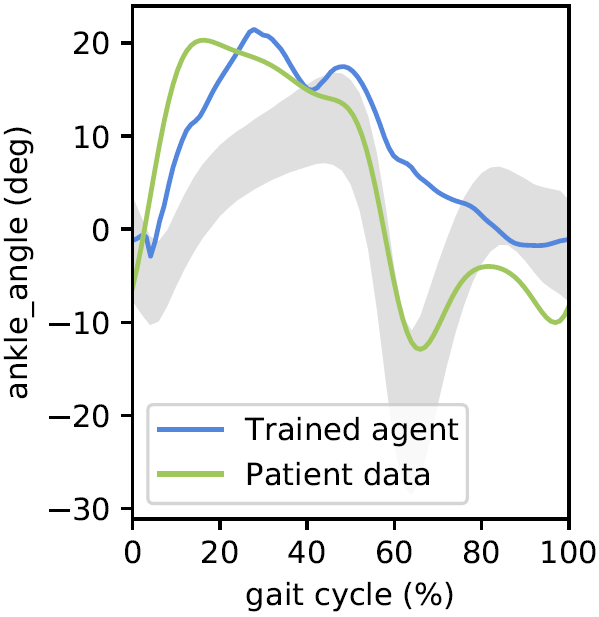
Actuellement, notre modèle est limité et ne satisfait pas l’objectif souhaité qui est de reproduire la démarche d’un patient parfaitement. En effet, il est nécessaire d’améliorer notre modèle afin de pouvoir avancer à l’étape d’après du projet. Cette étape consistera à modifier les propriétés d’une partie du corps (par exemple la flexibilité de la cheville) afin d’observer l’évolution du modèle dans sa démarche. L’objectif étant que la courbe bleue converge vers la zone grise qui représente le champ de marche d’une personne sans pathologie.



Laisser un commentaire